ժҪ��ijȼ��֏S�Ԅӻ�ݔúϵ�y(t��ng)��������r���� S7-300 ϵ�Юa(ch��n)Ʒ���������������ݔ��ϵ�y(t��ng)�Ć�ͣ���������_��λӋ��ҺλӋ���ӽ��_�P(gu��n)��Ԫ���ɼ��ς}ú������ˮ��ˮλ���O(sh��)���B(t��i)����Ϣ�������P(gu��n)��(sh��)��(j��)��Ϣ�@ʾ���˙C�����ϣ������M�Ю�����B(t��i)�����ù��I(y��)�ҕϵ�y(t��ng)�����r�O(ji��n)�ظ���λ���a(ch��n)���z����r������������������ݔúϵ�y(t��ng)�\�еĿɿ��ԡ���ȫ�ԣ��p�ٲ����ˆT�c�S�o�ˆT�ڄӏ��ȣ���������a(ch��n)Ч�ʡ�
ú�����a(ch��n)��ijȼ��֏S��Ҫ��(j��ng)�I�Ŀ֮һ��ݔúϵ�y(t��ng)�Ǵ_��ú�����a(ch��n)��ȫ�ɿ��\�е�֧��ϵ�y(t��ng)��ԓݔúϵ�y(t��ng)�� 14 �_��ӽoú�C��15 �lݔúƤ����2 �_��ӺY��2 �_����C��2 ��늴��F��1 ����ú�C��1 �_���ҙC��3 �_��ˮ�á�6 ��ú�}�M�ɡ�ԓϵ�y(t��ng)����Ҫ�΄�(w��)�nj������M���\ݔ�����顢ȥ �s���Y�x��������Ҫ���ԭú���r����ú�}���������a(ch��n)��ú���g���(y��ng)��ԓݔúϵ�y(t��ng)ԭ�����^���-���|������ϵ�y(t��ng) ����ú�C�ͳ��ҙC���� S7-200����ϵ�y(t��ng)���������֬F(xi��n)���������ƣ�����λ�����ˆTͨ�^�o�����v�C�F(xi��n)����ͨ������ݔ�;�·�L��ݔú�ȭh(hu��n)�����ӣ��O(sh��)�䔵(sh��)���࣬�Լ��o�����v�ɔ_���ԭ��ԓϵ�y(t��ng)���ڹ���Ч�ʵͣ����Ϸ������r�Բ��ȫ�Բ�Ȇ��}���b��ݔú����ϵ�y(t��ng)��ú�����a(ch��n)�^���е���Ҫ���ã���������a(ch��n)Ч�ʣ���ԓϵ�y(t��ng)�M�и���������������������һ���Ԅӿ��ƺͱO(ji��n)��ϵ�y(t��ng)���Ԍ��F(xi��n)�h�̲����c�O(ji��n)�ء�ԓϵ�y(t��ng)�����Ԅӡ��քӃɷN���Ʒ�ʽ���ɷN���Ʒ�ʽ���߂��B�i���ܣ���ѭ�ض����ͣ�������\�����c�ӹ��ܿ��ơ�
1 ϵ�y(t��ng)�M��
1.1 Ӳ��ϵ�y(t��ng)��(g��u)��
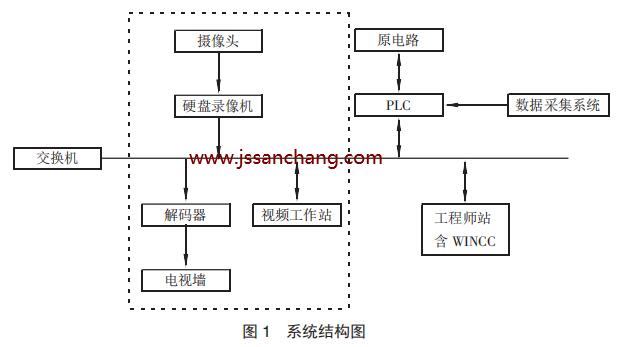
���θ�������Ӳ��ϵ�y(t��ng)������PLC ϵ�y(t��ng)����(sh��)��(j��)�ɼ�ϵ�y(t��ng)��HMI ϵ�y(t��ng)���I(y��)�ҕϵ�y(t��ng) ��Ҋ�D 1����
��1�� PLC ϵ�y(t��ng)
��ϵ�y(t��ng)���� S7-300 ϵ�е� 315-2PN/DP PLC������վ������ ET200M �ӿ�ģ�K�����վ������PROFIBUS-DP ������ DP ������B������ PLC��ET-200M����ú�C�ͳ��ҙC�� S7-200PLC��ͨ�^�^��ӳ��^(q��)���F(xi��n)�� PLC ֮�g�Ĕ�(sh��)��(j��)���Q��S7-300 ��ģ�K������С�� PLC ϵ�y(t��ng)���V����(y��ng)���ڸ��N���a(ch��n)�����I(l��ng)���书��ģ�K���ԝM���Ԅӿ����΄�(w��)���Ñ����Ը���(j��)���H��(y��ng)���x����m��ģ�K������Ҫ���ӿ����΄�(w��)�r����ͨ�^����ģ�K�� PLC ϵ�y(t��ng)�M�ДUչ��
��2�� ��(sh��)��(j��)�ɼ�ϵ�y(t��ng)
��(sh��)��(j��)�ɼ�ϵ�y(t��ng)�����_��λӋ��
ҺλӋ�������_�P(gu��n)����ƫ�_�P(gu��n)��Ԫ���M�ɣ��������_��λӋ�Á�y���ς}ú����ҺλӋ�Á�y����ˮ��ˮλ���ӽ��_�P(gu��n)�Á�z�yƤ����ƫ�����O(sh��)��ĘO��λ�á����_��λӋ�x�� ULM ϵ�Юa(ch��n)Ʒ��ԓ���_��λӋ���� FMCW (�{(di��o)�l�B�m(x��)��) �y��ԭ����������ݔ�r�g�D(zhu��n)�Q���l�ʲ�ķ�ʽ��ͨ�^�y���l�ʲ����ֱ�Ӝy���r���Ӌ��Ŀ�˾��x����(j��ng)�^�����{(di��o)�Ƶ�����̖ͨ�^�쾀�B�m(x��)�l(f��)�������ڱ��y���ϱ���a(ch��n)�����䲨�������_�쾀ϵ�y(t��ng)�����գ��l(f��)����̖�ͷ�����̖֮�g���l�ʲ��������쾀�����ϱ���ľ��x���Դ�Ӌ�����λ�߶ȣ�������(sh��)��(j��)ͨ�^ģ�M���ӿڂ��oPLC ��Ҋ�D 2����
��3�� HMI ϵ�y(t��ng)
HMI ϵ�y(t��ng)�O(sh��)����һ�_���I(y��)����Ӌ��C�����ù��I(y��)��̫�W(w��ng)��ʽ�c���Ŀ����� S7-300 ͨӍ��IPC �������������_����������ˆT HMI��WINCC �����а������O(sh��)��Ć�ͣ���c�ӿ��ơ����O(sh��)����\�Р�B(t��i)�����ψ��@ʾ������ģʽ�x��ȹ��ܡ�
��4�� ���I(y��)�ҕϵ�y(t��ng)
��ϵ�y(t��ng)�ɷ���Ͳ�;W(w��ng)�j(lu��)�z��C��Ӳ�P���C����a�������Q�C��Һ���ҕ���M�ɣ��ڸ���Ҫ��λ���b����Ͳ�;W(w��ng)�j(lu��)�z��C����ϟo�����vϵ�y(t��ng)��ʹ�����ҿɌ��r�O(ji��n)�أ�ָ�]�F(xi��n)�������ˆT�M��Ѳҕ�����a(ch��n)���z�ȹ�����
1.2 ܛ��ϵ�y(t��ng)
��1�� PLC ����ܛ��
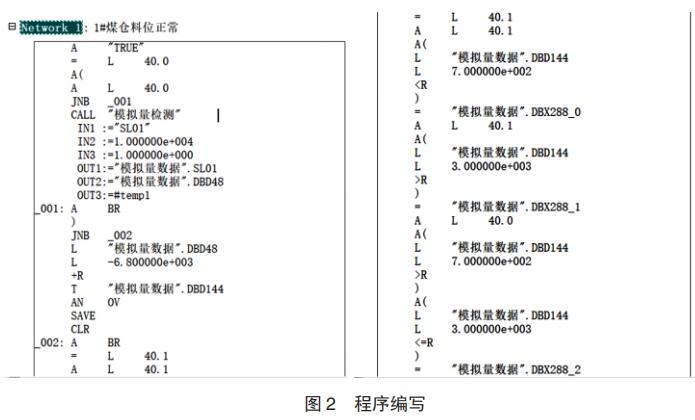
PLC ����ܛ������ SINAMIC STEP7 V5.5 SP4�汾���P���� STEP7 ��ϵ�y(t��ng)�M��Ӳ�����á�ͨӍ�M�B(t��i)�����̡��yԇ���\��ȡ����о����Z�Բ���LAD (���ΈD) �c STL (�Z���) ��Y(ji��)�ϵ���ʽ�����л���߉�� LAD ��������(sh��)�WӋ���c��(sh��)��(j��)����D(zhu��n)�Q�� STL ������
��2�� HMI ����ܛ��
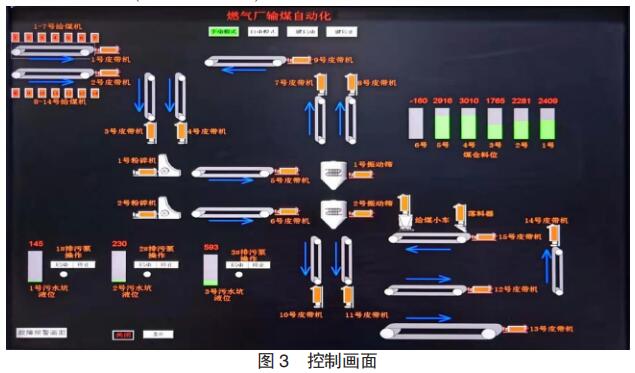
WinCC ��(sh��)��(j��)�ɼ��c����ϵ�y(t��ng)�ܸ�Ч�����Ԅӻ��^�̣����ИO�����_���Ժ�ϵ�y(t��ng)��(w��n)���ԣ������ڽM�B(t��i)�Ñ������Բ����C���ͱO(ji��n)ҕ�O(sh��)���B(t��i) [2] ��Ҋ �D 3������3�� iVMS-4200 Video Wall����Tʹ�� PC �C��ͨ�^ iVMS-4200 �ҕ���͑���ܛ�� iVMS-4200 Video Wall (�汾 v2.6.3.2) ���������ý�a���cӲ�P���C��
1.3 �W(w��ng)�j(lu��)�M��
ԓϵ�y(t��ng)�ɃɌӾW(w��ng)�j(lu��)�M�ɣ����I(y��)��̫�W(w��ng)��PROFIBUS-DP �W(w��ng)�����I(y��)��̫�W(w��ng)���ù��I(y��)��̫�W(w��ng)���Q�C��(g��u)�������ؓ�Y(ji��)��(g��u)������ HMI �@ʾϵ�y(t��ng)�cPLC ϵ�y(t��ng)ͨӍ��PROFIBUS-DP �W(w��ng)���ڿ����� PLC���h�̷ֲ�ʽ I/O ֮�g��ͨӍ
2 ��Ҫ����
����������ϵ�y(t��ng)�Ɍ��F(xi��n)�����քӿ��ơ��h���քӿ��ƺ��h���Ԅӿ��ƣ��h���ք�/�Ԅӿ���ͨ�^ HMI �_�P(gu��n)�M���x���� HMI �пɿ��Ƹ��O(sh��)���_�P(gu��n)���@ʾ�乤����B(t��i)����ָʾ����Ϣ�����I(y��)�ҕϵ�y(t��ng)���@ʾ�����桢�طŸ���λ�F(xi��n)����r��
2.1 �����քӿ���
�ڸ���λ���O(sh��)�б��ؿ����䣬���ɬF(xi��n)�������ˆT�քӿ����O(sh��)��Ć�ͣ���c�ӡ��ȹ��ܡ���PLC ϵ�y(t��ng)���F(xi��n)���ϣ��ȴ��S�����g���ܱ��C�������a(ch��n)��
2.2 �h���քӿ���
�� HMI ���x���քӿ��ƣ��� HMI �_�P(gu��n)���B�i������_��ͣ���O(sh��)�䣬Ҳ�ɆΪ��c�Ӹ��O(sh��)�䣬�c�ӕr���O(sh��)�䲻���B�i�P(gu��n)ϵӰ푡����⣬ͨ�^����B�i�·��Ҳ�Ɍ��F(xi��n)��ͣ���ܡ�
2.3 �h���Ԅӿ���
�����ˆTѲ�z�O(sh��)�䣬�_���O(sh��)��߂䆢�ӗl������������ HMI ��һ�I���ӣ����Ӻ���ú�C�Ԅ����е� 1 ̖�ς}��Ƥ������ǰ������ʾ��Ȼ���O(sh��)��������ĸ���̖������̖�g�� 5 s ���Ԅ��B�m(x��)����O(sh��)�䆢�ӡ����У����ӽoú�Cֻ����Ƥ��ȫ���\�к����H��ú�����քӆ��ӡ�ݔú�^���У���ú�C���ς}�M�}�rֹͣ��ú�����Ԅ����е���һ�ς}���^�m(x��)��ú���������ӽoú�C��ֹͣ������Ȼ���������� HMI ��һ�Iֹͣ�����O(sh��)��ֹͣ��ĵ���̖������̖�g�� 5 s ���Ԅ��B�m(x��)����O(sh��)��ֹͣ����ˮ������ˮ��ˮλ�r���Ԅӆ�ͣ��Ҋ�D 4����
2.4 ҕ�l�O(ji��n)��
���� XE62 ϵ�оW(w��ng)�j(lu��)�z��C�M��ҕ�l�ɼ���ͨ�^DS-6900UD �����a����a�@ʾ������ DS -8632N Ӳ�P���C���D���M��̎�������桢�z������ݣ��Լ��W(w��ng)�j(lu��)���f���h�̿��ơ�����Ͷ�ŵ��M��Һ�����ҕ���ϣ��ɸ���(j��)��Ҫ�����@ʾ������Ŵ����� iVMS-4200 Video Wall (�汾 v2.6.3.2) ܛ���M�����á�
3 �Y(ji��) �Z
ԓϵ�y(t��ng)�Ŀ��w���g(sh��)�������Թ��I(y��)Ӌ��C ��IPC��ϵ�y(t��ng)��PLC �����ϵ�y(t��ng)���ģ����þW(w��ng)�j(lu��)ϵ�y(t��ng)��(g��u)���f�A�ֲ�ʽ�wϵ�Y(ji��)��(g��u)��ԓ�Y(ji��)��(g��u)���а��b�侀���Σ��S�o����ă�(y��u)�c��������ϵ�y(t��ng)���F(xi��n)���O(sh��)���\�е��Ԅӻ������ͱO(ji��n)�أ��p�p������ؓ���������ϵ�y(t��ng)�Ŀɿ��ԡ��ɿ��ԺͰ�ȫ�ԣ���������˹���Ч�ʣ�����������I(y��)���档Ͷ��ʹ�ú��\�Р�B(t��i)���á�


����")





������Ӌ")

������Ӌ")
���аl(f��)�x�����������I(y��)�Ԅӻ�����")