�a(ch��n)Ʒ���
����?j��)x��
- 늴�����Ӌ(j��)
- �u������Ӌ(j��)
- �����D(zhu��n)������Ӌ(j��)ϵ��
- ��������Ӌ(j��)
- �u݆����Ӌ(j��)
- ���M(j��n)���u����Ӌ(j��)
- �װ�����Ӌ(j��)
- V�F����Ӌ(j��)
- ����������Ӌ(j��)
- ��ʽ����Ӌ(j��)
- ��?t��ng)����������?j��)
- ��������Ӌ(j��)
- �E�A�X݆����Ӌ(j��)
- ���w����Ӌ(j��)
- �������w����Ӌ(j��)
- ������
- Һ�w����Ӌ(j��)
- Һλ׃����
- �ŷ���ҺλӋ(j��)
- ������ҺλӋ(j��)
- ����ҺλӋ(j��)
- 偠tˮλӋ(j��)
- ���_(d��)��λӋ(j��)
- ����ҺλӋ(j��)
- ���l��(d��o)�{��λ�x��ϵ��
- ���Nʽ��λӋ(j��)ϵ��
- ��λӋ(j��)
- ������ҺλӋ(j��)
- ����Һλ׃����
- �������
- ���_(d��)Һλ׃����
- ����Һλ�_(k��i)�P(gu��n)
���g(sh��)����
�u������Ӌ(j��)�ĉ��̽�^�(y��u)���x�����͜y(c��)�������о�
�l(f��)�����ڣ�2022-02-12 ��(l��i)Դ��( 1�������r(n��ng)�I(y��)��W(xu��)���W(xu��)Ժ������ �ϲ� 330045; 2������ʡ�����O(sh��)ʩ���g(sh��)�_(k��i)�l(f��)�����о����ģ����� �ϲ� 330045 ���ߣ��� �ݣ��� �� ��Ф־�h �g�[�Δ�(sh��)��
����(d��o)�x���������O(sh��)Ӌ(j��)���о���һ�N���ڜu�����(d��ng)�ĉ�늂����b�á�ͨ�^(gu��)푑�(y��ng)��̖(h��o)��������т��о��x�����c�@���wֱ�������ٵ�׃��Ҏ(gu��)�ɡ������������̣����ϔ�(sh��)ֵģ�ͣ���(g��u)�������ٜy(c��)�����·�����......
ժҪ:ᘌ�(du��)�u��ʽ���ق����������̖(h��o)��������ȡ�����u����̖(h��o)���y�����ډ�늷��̺�����N-S���̣������������̣����Ϸ���Ӌ(j��)��ģ�ͣ���(g��u)�������ٜy(c��)�����·�����ͨ�^(gu��)��Փ�������L(f��ng)����(sh��)�(y��n)���@���ˈA���@���wֱ��(D)���՚�����(v)�c��늂��о��x(L)�Լ�����(P)֮�g��Ӱ�Ҏ(gu��)�ɡ�����Ӌ(j��)��͌�(sh��)�(y��n)�Y(ji��)������:ͨ�^(gu��)��ȡ�l�������Мu���l���µĹ�������u�ֵĂ��Џ�(qi��ng)�ȣ������ڸ�֪���Ŀ՚�������̖(h��o)��ͬ�r(sh��)��Q�����·�ϵĸɔ_Ӱ푡���Σ�D���ӣ��dz���(y��u)���о��x(Losr)����;D��׃�r(sh��)������(Posr)�S�����������ߣ���Losr��׃;ͨ�^(gu��)�����ó��˲ɼ���̖(h��o)��Losr�·dz���(y��u)�ı��|(zh��)ԭ��—��ԓ̎���u�ֳ�����Ó�䷀(w��n)��������ϵ��(sh��)(CL)��(w��n)�����dz���ԓ����b�Üy(c��)���ķdz������ٞ�0��3m/s��
�u�����(d��ng)(VIV)��һ�N���͵��������(d��ng)(FIV)���Y(ji��)��(g��u)�ķ������͕�(hu��)��(d��o)���������w���������®a(ch��n)�����������uÓ�䣬ʹ�Y(ji��)��(g��u)�ܵ��c����ֱ�������Ԛ��(d��ng)�����M(j��n)�����l(f��)�Y(ji��)��(g��u)�ęM�����(d��ng)��1�ݡ��������w�����c���uÓ���l���Ќ�(du��)��(y��ng)�P(gu��n)ϵ����˳������ɶ�N�՚����ق����������磬���������u�����(d��ng)ԭ�����ƵĜu������Ӌ(j��)�����I(y��)��(j��)���u������Ӌ(j��)��Ҫ���ܭh(hu��n)�����ĸɔ_����(d��o)���䌦(du��)���ٲ����С�ͬ�r(sh��)���՚����ق������V����(y��ng)����������h(hu��n)�����ƣ��L(f��ng)�ܲɼ��������z�y(c��)������O(ji��n)�أ����I(l��ng)���2��4�ݡ����磬�����ݭh(hu��n)���O(ji��n)�y(c��)�I(l��ng)��ͨ�L(f��ng)�r(sh��)����̫���������ݏ�(qi��ng)�ҵđ�(y��ng)������(y��ng)����ֲ��ض��E����(d��o)�����ݏ�(qi��ng)��ð����������ݵ����a(ch��n)���ܡ��������������L(zh��ng)�ٶȵ��½���5��6�ݣ���ˣ���(du��)������ͨ�L(f��ng)�b�õ����ٙz�y(c��)������Ҫ�����y(t��ng)FIV����������ÙC(j��)е�D(zhu��n)��(d��ng)�Y(ji��)��(g��u)����Y(ji��)��(g��u)��(f��)�s����(du��)�ӹ����Ⱥ͙C(j��)е��(w��n)���Զ����^�ߵ�Ҫ���7�ݡ��������(l��i)���É�늲���������Ԫ�����Ƶ�FIV���������䲻��Ҫ�D(zhu��n)��(d��ng)�������ҿ��c�C(j��)�ϵ�y(t��ng)(MEMS)���ɣ���������ͻ���8��10�ݡ�Ŀǰ��VIV��������Ҫ���ÃɷN��늲����������Ԫ��:�����U����մ�(PZT)�;�ƫ������ϩ(PVDF)��
PVDF��Ĥ����������Ե����c(di��n)���m���ڽ�׃�d�ɵĸ�֪��11��12�ݡ�Ȼ�������ʽ���u�����(d��ng)(PVIV)���ق�����߀���S����Ƶĵط����e
�Ǚz�y(c��)������(ch��ng)���ٕr(sh��)(���ٵ���2m/s)���u�։����̖(h��o)����ͬ�r(sh��)�y(c��)���F(xi��n)��(ch��ng)�����ɔ_����(du��)�^��(qi��ng)����ɜu��������̖(h��o)��ȡ�����y������y(c��)���^(gu��)���У����Ԫ������������(ch��ng)�_��(d��ng)�a(ch��n)������̖(h��o)���L(f��ng)��ϵ�y(t��ng)�a(ch��n)��������̖(h��o)�ȣ���(hu��)�ќu������Ӌ(j��)������̖(h��o)�͛](m��i)��ᘌ�(du��)�@һ��(w��n)�}���S���W(xu��)�ߌ�(du��)PVIV���ق�����չ�_(k��i)��ȫ����о������@���w���Π���Ų���13��14�ݡ��·�z�y(c��)��ʽ��15��16���Լ���̖(h��o)��ȡ������17��19�ݣ�����˿՚����ٜy(c��)�����Ⱥͷ�����PVIV���ق������ĽY(ji��)��(g��u)���ÈA�λ��������u�@���w��PZT��PVDF��Ĥ�����Ԫ���M�ɡ��о��l(f��)�F(xi��n)����׃�@���wֱ����(hu��)��(d��o)���@���c������Ԫ��֮�g�ľ��x��ͬ���@���������u�y(c��)��λ�ú��@���wֱ����Ӱ�PVIV�z�y(c��)���ȡ�
ᘌ�(du��)������(w��n)�}���P�������һ�N����PVIV���ق����b�á�ԓ�b���ɈA���@���w��PVDF��늑ұ����M�ɡ����Ô�(sh��)ֵģ�M�����о��u������(ch��ng)���ԣ������������Y(ji��)��(g��u)����(sh��)��(du��)�u������Ӌ(j��)푑�(y��ng)��̖(h��o)�z�y(c��)��Ӱ�Ҏ(gu��)�ɡ�����ͨ�^(gu��)��ȡ�l�������Мu���l���µĹ�������u�ֵĂ��Џ�(qi��ng)�ȣ�����(qi��ng)�˸�֪��������푑�(y��ng)��̖(h��o)�����܉��Q�����·�ϵĸɔ_Ӱ푣��U(ku��)���ˌ�(du��)�����ٵęz�y(c��)����������`������푑�(y��ng)�Ŀ՚����ق����������O(sh��)Ӌ(j��)���y(c��)���ṩ�µ�̽�y(c��)������
1��늜u�����(d��ng)���ق����b��
1��1���нY(ji��)��(g��u)
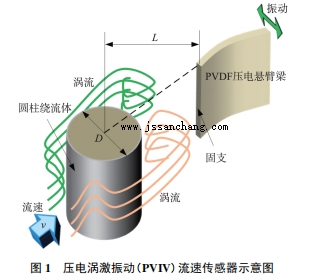
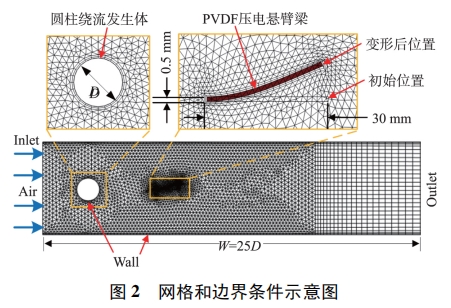
����PVIV���ق����b�õĽY(ji��)��(g��u)��D1��ʾ��ԓ�Y(ji��)��(g��u)�ɈA���@���w��PVDF��늑ұ�����(g��u)�ɣ����Бұ����ɱ���Ϳ���y늘O�ӵ�PVDF��Ĥ�M��;ͬ�r(sh��)�������A���@���wһ��(c��)��PVDF��늑ұ����˲���֧���A���@���wֱ��D=7mm���A���w���ľ�PVDF��늑ұ�����֧�˾��x��L(zh��ng)���������ٞ�v���䷽��ֱ�ڈA���w���档����Ӌ(j��)��r(sh��)��Dֵ�ķ�����30mm��70mm��vֵ������0��3m/s��2��5m/s��Lֵ�ķ�����50mm��170mm�����˺�(ji��n)��Ӌ(j��)��Ϳ��ƶ���׃����PVDF��늑ұ����߶�h�O(sh��)����30mm����(d��ng)����(l��i)�����Õr(sh��)��PVDF��늑ұ����Y(ji��)��(g��u)�a(ch��n)����ʎ������(j��)���Ч��(y��ng)����늌ӵ�׃��ʹ�����ۼ�늺ɣ��γ�푑�(y��ng)늉���
1��2�����̣�����ģ��
���ښ�����(j��ng)�A���w�a(ch��n)���u���Ě�������(d��ng)����̎��������B(t��i)������(ch��ng)�ķֲ���(f��)�s����ˣ��P�߽Y(ji��)��Ӌ(j��)�����w���W(xu��)(CFD)�Լ����Ч��(y��ng)�M(j��n)�Д�(sh��)ֵģ�M�������@���wֱ�����c��늂��о��x��(du��)�Ϳ՚����ٙz�y(c��)��Ӱ�Ҏ(gu��)�ɡ�
1��2��1��Փģ��
��늂��нY(ji��)��(g��u)��֪���w����(d��ng)��һ��(g��)�������(ch��ng)��ϵď�(f��)�s�^(gu��)�̣���Ҫ��������(ch��ng)������(ch��ng)����늈�(ch��ng)�ľC�����á�����(ch��ng)�a(ch��n)���ĉ���(qi��ng)�D(zhu��n)���鉺�������ڑұ�������a(ch��n)���Y(ji��)��(g��u)׃�β������䉺늌�׃�Σ�����(j��)���Ч��(y��ng)�a(ch��n)��늺ɣ�Ӌ(j��)��ģ����ͨ�^(gu��)�C(j��)���Ϸ�ʽ���a(ch��n)����늺�ȫ���ۼ��ڑұ������棬�dz��K�D(zhu��n)����˲�B(t��i)늉���׃���w�Π�ĸ�׃����׃����(ch��ng)�����е����������������(d��ng)������(ch��ng)���Ʒ��́�(l��i)��������(d��ng)����(ch��ng)����С��0��3�R�գ�����(ch��ng)���J(r��n)���Dz��ɉ��s���@�N���ɉ��s��ţ�D���w���|(zh��)�����B�m(x��)�Է���(1)��N-S(Navier-Stokes)����(2)����������������ʾ:
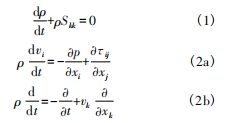
ʽ��:p������(ch��ng)����(qi��ng)��ρ������(ch��ng)�ܶȣ�vi���ٶ�ʸ����τij�鑪(y��ng)��������Skk�鑪(y��ng)׃�ʏ�����ʽ(1)��ʽ(2)��ģ���ЈA���@���w�����Լ��ұ��������O(sh��)����o(w��)����߅�硣
�ډ�늲��Ϻ�ȘO���ľ���Euler-Bernoulli�����O(sh��)�£��C(j��)���ϵı���(g��u)���̞�һ�S:
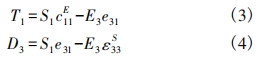
ʽ��:��(bi��o)1��3�քe��ʾ�����L(zh��ng)�Ⱥͺ�ȷ���;T1�鑪(y��ng)��;S1��ұ����L(zh��ng)�ȷ���đ�(y��ng)׃;D3���λ��;E3��ͨ�^(gu��)��늌Ӻ�ȵ�늈�(ch��ng);cE11��㶨늈�(ch��ng)�µď��Ԅ���;εS33��㶨��(y��ng)׃�µĽ�늳���(sh��);e31�鉺늳���(sh��)��ʽ(1)��(4)�γ���һ��(g��)���Ƃ��������(d��ng)���C(j��)е��늵���Ϸ��̽M���茦(du��)δ֪��(vΩ��pΩ��T1��D3)�M(j��n)����⡣�P�߽��������ɶ�ϵ�y(t��ng)�Ą�(d��ng)���W(xu��)���̺͙C(j��)���Ϸ��̣����A�Ǿ��Է��²������̺�˹�������������ʾ:
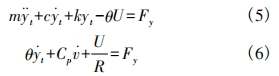
ʽ��:m��ұ������|(zh��)����c��ұ����Y(ji��)��(g��u)���ᣬk�鄂��ϵ��(sh��)��F(xi��n)y������(ch��ng)�����ڑұ���y�����ϵ�˲�r(sh��)������θ��C(j��)�����(xi��ng)���Ҟ������裬U��������늉���Cp��ұ�����늌���ݣ�yt�鉺���픲�y����˲�r(sh��)λ�ơ��_(k��i)·�����r(sh��)�����NI�ɼ�ϵ�y(t��ng)�����ֵ�o(w��)�F��(��=∞)���ɫ@�É����픲�λ���c�_(k��i)·늉��P(gu��n)ϵ:
ͨ�^(gu��)���Ʒ���(1)��(2)��(5)��(7)�ɫ@�Üu�����(d��ng)�a(ch��n)����늉��c����(ch��ng)����֮�g���P(gu��n)ϵ������(j��)�����~׃�Q��ʽ:
ʽ��:U(t)�鉺���̖(h��o)�ĕr(sh��)��ֵ��U(f)��ԓ��̖(h��o)���l��ֵ������ͨ�^(gu��)LabVIEW���ڲɼ�ݔ����̖(h��o)��
1��2��2����Ӌ(j��)��
������PVIV���ق�������(ji��n)����һ��(g��)���S����ģ�ͣ���D2��ʾ�����У�D��A���͜u���l(f��)���wֱ����Ӌ(j��)����?y��n)?5D×5D�ľ��Σ���늑ұ���λ�ڈA�������S���ϣ���˹�֧��ģ���У�v������0��3m/s��2��5m/s��D������30mm��70mm�������Z��(sh��)��500��9800֮�g���xȡ�՚�����υ���(sh��)������SIMPLE��������M(j��n)��˲�B(t��i)������Ӌ(j��)����υ���(sh��)���1��ʾ�����������ηǽY(ji��)��(g��u)���ľW(w��ng)�֣��ڈA����PVDF������ĺ��ą^(q��)��W(w��ng)��ֲ��^�ܼ���

2���L(f��ng)��ԇ�(y��n)
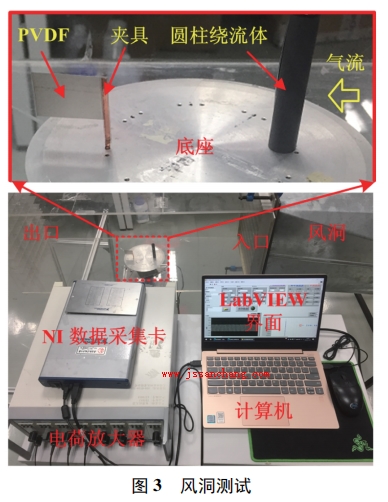
ԇ�(y��n)�ڵ����L(f��ng)���M(j��n)�У��y(c��)ԇƽ�_(t��i)��D3��ʾ���ɼ��ĉ����̖(h��o)ͨ�^(gu��)늺ɷŴ����cNI��(sh��)��(j��)�ɼ������B���\(y��n)��LabVIEW��(du��)��̖(h��o)�M(j��n)��ADC��(sh��)ģ�D(zhu��n)�Q���V�����l�V����(FFT׃�Q);ͨ�^(gu��)����λ�Ƃ������ɼ��u�����(d��ng)�r(sh��)�����ĩ�˵�y��λ�ơ��dz��K��Ӌ(j��)��C(j��)���@ʾPVDF��������(d��ng)�ĕr(sh��)���������l�V���������c(di��n)̽����늂��о��x�ڲ�ͬ�A���@���wֱ���ߴ������׃���ėl����(du��)����(ch��ng)��֪���Ե�Ӱ�Ҏ(gu��)�ɡ�ԇ�(y��n)�l�����2��ʾ����(sh��)�(y��n)�У���50mm��170mm���g��10mm���Μy(c��)����ͬ���x�µĜu������Ӌ(j��)푑�(y��ng)��̖(h��o)��
3��Ӌ(j��)���c�y(c��)ԇ�Y(ji��)������
ͨ�^(gu��)���T(m��n)�u����Փ���P�߫@���˜u������Ӌ(j��)�a(ch��n)�������ٗl���͈A���@���wֱ��������

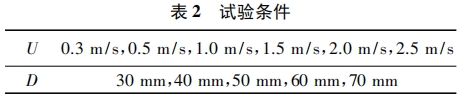
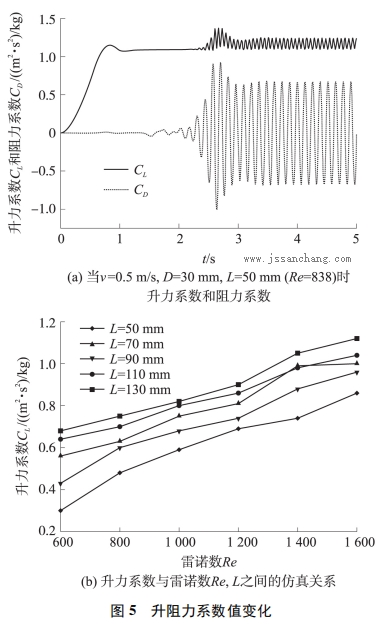
ʽ��:μ��՚��(d��ng)���W(xu��)ճ�ȣ�St��˹�ڹ�����(sh��)��f��u��Ó���l�ʡ���(d��ng)���Z��(sh��)�ڵķ�����(n��i)���u����(hu��)��һ��(g��)����(du��)��(w��n)�����l��������Ó�䣬����(j��)���ٗl���͈A��ֱ���������ɵó���ԓ�l���µ����Z��(sh��)������500��9800���M��a(ch��n)���u��Ó��ėl�����D4�����ٞ�2m/s���A��ֱ����30mm�£��a(ch��n)���u��Ó������ԡ��ɈD��֪���u������Ӌ(j��)�Ľ���Ó����Ҫ��(j��ng)�vһ��(g��)���L(zh��ng)�����졢˥�˵��^(gu��)�̡�PVDF��늑ұ�����ˮa(ch��n)����̖(h��o)�Ă��Џ�(qi��ng)���c���о��x���P(gu��n)���ɴ��(y��n)�C�˱������Üu������Ӌ(j��)���еĺ����ԡ�
�D5չʾ����/����ϵ��(sh��)�c���о��x�����Z��(sh��)���P(gu��n)ϵ������PVDF��늑ұ�����˹�֧�����ɶ��ڜu�����ܵ����u�����������ö��a(ch��n)��y�������������ʎ���D5(a)���e=838��L=50mm�r(sh��)������(ch��ng)��/�����������ɈD��֪����Ӌ(j��)��r(sh��)�g�s3s��5s����(ch��ng)������(w��n)�����D5(b)����ϵ��(sh��)�c���Z��(sh��)��e��L֮�g�ķ����P(gu��n)ϵ����֪�S��e��������(ch��ng)������(qi��ng)������(qi��ng)���˕r(sh��)��늑ұ����������ܵĉ������ӣ�����������L=50mm�r(sh��)����ֵ�_(d��)1��1��ֵ���P(gu��n)ע���ǣ�����ͬ���Z��(sh��)�£��S���о��x����������ϵ��(sh��)�S֮�½���������(ch��ng)�ʬF(xi��n)˥�p�ĬF(xi��n)�����У���L=50mm������늑ұ����c�A���@���w֮�g���x�dz����r(sh��)��������ϵ��(sh��)�dz��ߣ���ӳ����(ch��ng)����(d��ng)�dz����ң���ԭ���Ǒұ�����λ���ڜu�����L(zh��ng)�^(q��)����ˉ�늑ұ��������A���w�^(q��)����F(xi��n)�u����������ɵĉ�����(du��)��늑ұ��������������(d��ng)�a(ch��n)������(qi��ng)�����á����⣬L=50mm��70mm������(n��i)������ϵ��(sh��)�������w�½������@;L=70mm��110mm������(n��i)������ϵ��(sh��)�������F(xi��n)����ĬF(xi��n)���f(shu��)��ԓ�^(q��)������(ch��ng)����(d��ng)׃�����ƣ��˕r(sh��)PVDF��늑ұ�����λ�������ǜu�ֳ���^(q��)���m���γɷ�(w��n)���Ĝu������Ӌ(j��);L=110mm��130mm������(n��i)��������ϵ��(sh��)�������w�½����@����(ch��ng)����(d��ng)�Դ���½����˕r(sh��)���Z��(sh��)��600��������ϵ��(sh��)�½���0��3���˕r(sh��)�ұ�����λ�������ǜu��˥�˅^(q��)��
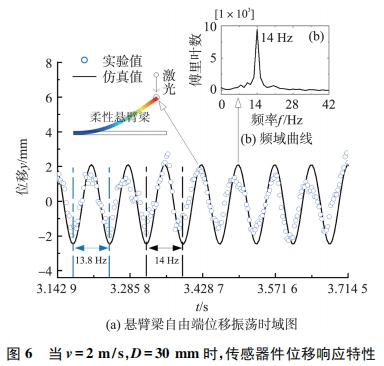
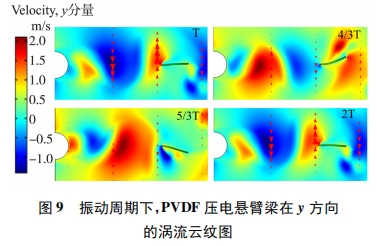
�D6չʾ�������ٞ�2m/s���A��ֱ����30mm�l���£���������λ��푑�(y��ng)���ԡ��ɈD��֪������(ch��ng)����3s�ұ����a(ch��n)����y������ʎ��u��(w��n)����ԓ�Y(ji��)���(y��n)�C�ˈD5(a)������(ch��ng)��/�����c�r(sh��)�g���P(gu��n)ϵ���ܜu�����ã��ұ������ɶ˲��a(ch��n)����y��λ�Ʒdz���;��(du��)�ȈD5��Ӌ(j��)��λ��������ͨ�^(gu��)����λ�Ƃ������y(c��)�õČ�(sh��)�(y��n)λ�������l(f��)�F(xi��n)����(sh��)�H�y(c��)������ʎ�����ķ�ֵ��С��Ӌ(j��)���ֵ��ͬ�r(sh��)ǰ�ߵ���ʎ�l��(13��8Hz)��С�ں��߮a(ch��n)������ʎ�l��(14��0Hz)��ԭ������Ӌ(j��)���O(sh��)�õ�������c��(sh��)�Hֵ���`�Ȼ�������`���^С����(sh��)�H�y(c��)������ʎ�����cӋ(j��)��ĵ��Ĵ���һ�£�����C��(sh��)�������������Ӌ(j��)��Ĝ�(zh��n)�_�ԡ�
�D7�o���ˈA���@���wֱ����30mm�r(sh��)�����������cPVDF�ұ�����֪�u������Ӌ(j��)�l��֮�g���P(gu��n)ϵ���P����Ҫ��(du��)�ȿ��T(m��n)�u����Փֵ������Ӌ(j��)��ֵ�c��(sh��)�(y��n)ֵ����D��֪��Ӌ(j��)��ֵ�����Փֵ�����c��(sh��)�(y��n)ֵ����ӽ�������Ӝ�(zh��n)�_�ķ�ӳ��(sh��)�H��r�µĜu�����(d��ng)�r(sh��)�a(ch��n)���Ĝu�֬F(xi��n)���M(j��n)һ���f(shu��)�����ķ���Ӌ(j��)��ĺ��������У����ٞ�1m/s�r(sh��)�Č�(sh��)�(y��n)�cӋ(j��)��r(sh��)������(�D7(b)��7(c))��֪������Ӌ(j��)���µ�PVDF��늑ұ����a(ch��n)����늉�푑�(y��ng)��̖(h��o)��(w��n)�����ڜu������Ӌ(j��)��(w��n)������늉���ֵ�S�r(sh��)�g���㶨���@�f(shu��)���˕r(sh��)�ұ�����y�������ʎ��ֵ��(w��n)��;����(du��)�ȈD7(b)��֪����(sh��)�H�l���²ɼ���늉��r(sh��)�������ڷ�ֵ��С���S�r(sh��)�g����(d��ng)�^�����@�������ڃ�(n��i)��U�壭U��ֵ��������(w��n)������ԓ�����ϕ�(hu��)�B�Ӱ����·�ɔ_�����l�ɔ_���Լ�����(ch��ng)��(du��)������a(ch��n)����x��������(d��ng)Ӱ푡��ڴ���r�£�������(j��)ǰ�ˣ�20�ݲ�����ȡ늉���U�壭U��ֵ��0��U��ֵ��Urms�ķ�����(l��i)�����������֪�u�ֵ���������������(zh��n)�_����ͨ�^(gu��)��ȡ���ʵķ��������(zh��n)�_����˱��IJ���ͨ�^(gu��)��ȡ�l�������Мu���l���µĹ��ʱ����u�ֵĂ��Џ�(qi��ng)�ȡ�
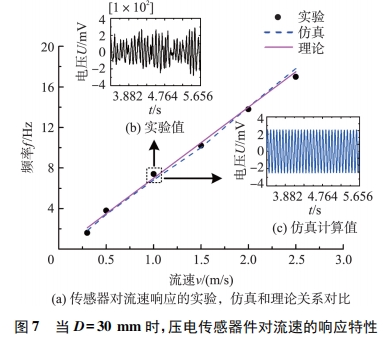
���⣬�ɈD7��֪�������У�PVDF��늑ұ����əz�y(c��)�����ٞ�0��3m/s���˕r(sh��)ԓ�ұ����a(ch��n)�������(d��ng)�s��2��0Hz��ԓֵ�c��Փֵ����(sh��)�(y��n)ֵ�ӽ����M(j��n)һ���f(shu��)���˱��ķ���Ӌ(j��)��ĺ�����
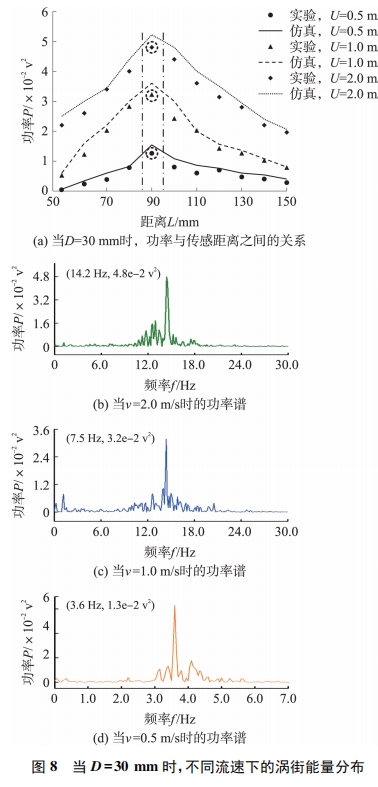
�D8����Џ�(qi��ng)��(����P)�ڲ�ͬ���о��x�µķֲ��������o����D=30mm�������������Ξ�0��5m/s��1��0m/s��2��0m/s�r(sh��)�Č�(sh��)�(y��n)��Ӌ(j��)��Y(ji��)����ͬ�r(sh��)����(j��)ʽ(8)��Pֵ�Ɍ�(du��)��(y��ng)�r(sh��)������ͨ�^(gu��)�����~׃�Q(FFT)�D(zhu��n)�Q����(l��i)���D8(a)��֪��ͬһ�@���wֱ���£�����Խ����P�S����λ�õ�׃��Ҏ(gu��)�ɻ���һ�£�������L��90mm�����dz���ӳ������ͬ�^(q��)��PVDF������y(c��)������̖(h��o)��(qi��ng)���_(d��)���dz���;ͬ�r(sh��)��ӳ���dz��т��о��x(Losr)�c�������ٴ�С�o(w��)�P(gu��n)������ԭ����(j��)���T(m��n)�u����Փ���P���J(r��n)���@�����ڜu�ֽ���Ó��r(sh��)���u����?q��)�������a(ch��n)����Ӱ푣������uy������ٶ�������ʎ����(�����D9���ڃ�(n��i)��y��������(ch��ng)�ٶȿ�֪)���cx�����������ٷ���o(w��)�P(gu��n)��ֵ��ע����ǣ��ɈD8(b)���D8(d)�l(f��)�F(xi��n)������ֱͬ���£��S������������(ch��ng)��(du��)������a(ch��n)���ļ��l�ɷָ����(f��)�s���@�c�D5(b)��������S��e��������(ch��ng)������(qi��ng)������(qi��ng)����ӳ����(ch��ng)����(d��ng)���ӄ��ҡ����nj�(du��)�ڮa(ch��n)���u�ֵ��l�ʷ�(w��n)�����c��Փ(ʽ(10))һ�£��M(j��n)һ���f(shu��)���˱��IJ��ù��ʁ�(l��i)�������Џ�(qi��ng)�ȵĺ����ԡ����⣬�^�y(c��)�D8(a)��֪��L���^(gu��)110mm�r(sh��)��Pֵ���½�������ԭ����(j��)�u����Փ��������Եĺ�ɢ���˕r(sh��)���u��u˥�ˣ����Էdz��ѵĂ���λ�Ñ�(y��ng)�ڜu�ֵij���^(q��)������
�D10����Џ�(qi��ng)��(P)�ڲ�ͬ���о��x�µķֲ�������չʾ�˵�������r�£���v=1m/s���@���wֱ�����Ξ�30mm��40mm��50mm�r(sh��)�Č�(sh��)�(y��n)��Ӌ(j��)��Y(ji��)����
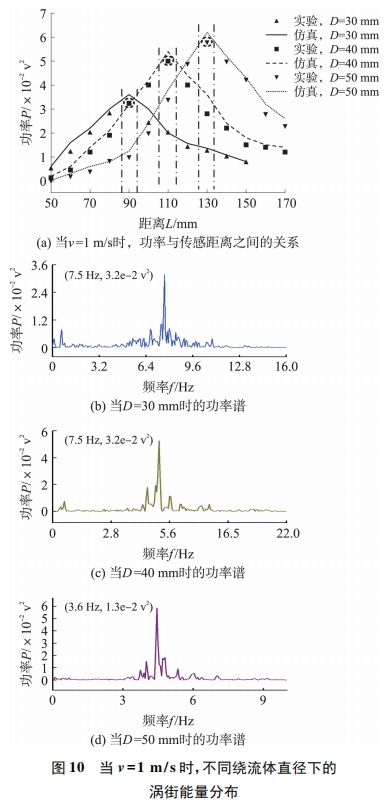
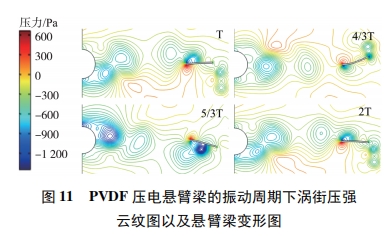
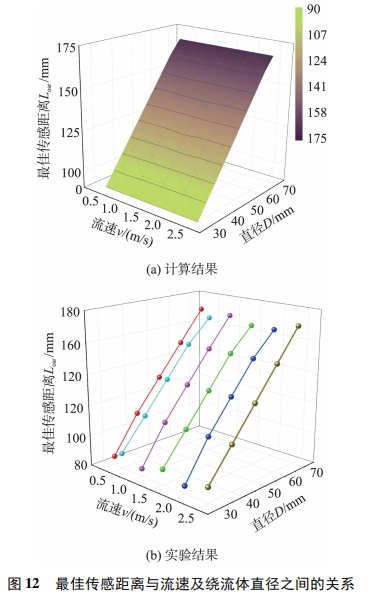
�ɈD10(a)��֪��P�S���о��xL�ķֲ�Ҏ(gu��)��������ͬ����(d��ng)DԽ��LosrԽ�����uԽ�h(yu��n)�x�@���w�����箔(d��ng)D=30mm�r(sh��)��Losr=90mm;��(d��ng)D=40mm�r(sh��)��Losr=110mm;��(d��ng)D=50mm�r(sh��)��Losr=130mm��ֵ��ע����ǣ��ɈD10(b)���D10(d)�l(f��)�F(xi��n)������ͬv�£��SDֵ��������(ch��ng)��(du��)������a(ch��n)���ļ��l�ɷָ��٣�����ԭ�����������S��Dֵ������CCT�ɂ�(c��)�a(ch��n)���Ľ������u�֮�g�����ÜpС��ʹ������(ch��ng)�IJ���(d��ng)�pС����(d��o)�µġ��D11չʾ�ˮ�(d��ng)v=0��5m/s��D=30mm�r(sh��)��һ��(g��)���(d��ng)�����u�։���(qi��ng)�Ƽy�D�Լ��ұ�����׃����r������ֱ�ӿ������ұ����ڜu�����ܵ������µ����u���������a(ch��n)����ʎ�F(xi��n)�����Бұ����ɂ�(c��)�ĉ���(qi��ng)���nj�(d��o)�ұ�����ƫ�D(zhu��n)��ֱ��ԭ������(qi��ng)�������ڜu��ͨ�^(gu��)�ұ����a(ch��n)���ġ��c��ͬ�r(sh��)������(qi��ng)��a(ch��n)��������(ch��ng)��������ʹ�Ñұ����õ������ϼ������\(y��n)��(d��ng)�ļ��ٶȡ����H��ˣ��ұ������ɶ�����S�r(sh��)�g�����L(zh��ng)�dz��죬�_(d��)���dz�������r(sh��)�����(d��ng)�ٶȷdz�С�����⣬һ��(g��)���(d��ng)���ڃ�(n��i)���ұ����a(ch��n)���˃ɴ����(d��ng)����ĸ�׃��ʹ�Ñұ����܇�����(ch��ng)Ҳ�l(f��)���������Եĸ�׃��PVDF��늑ұ����c����(ch��ng)��������γ����^�鷀(w��n)�������(d��ng)Ҏ(gu��)�ɣ����(d��ng)���ڱ��ֲ�׃���D12��dz��т��о��x�c���ټ��@���wֱ��֮�g��Ӌ(j��)�㼰��(sh��)�(y��n)�P(gu��n)ϵ���ɈD12(a)��֪��Losr�SDֵ������u���ӣ��ҽ��ƾ����P(gu��n)ϵ��ͬ�r(sh��)���y(c��)�������cӋ(j��)������һ�¡�����ԭ����(j��)�D4��ʽ(10)���dz��т��о��x��(y��ng)ԓ�����u�ij���^(q��)��D����r(sh��)����ɂ�(c��)���Ќ�֮�g���x׃���������׃����ʹ���u��Ó���l�ʜpС��ʹ�����u�a(ch��n)��λ�þ��@���wԽ�h(yu��n)�����dz��љz�y(c��)λ��Խ�h(yu��n)�x�A���@���w���ɈD12(a)�M(j��n)һ����֪��Losr�cv�o(w��)�P(gu��n)���@�c�D8(a)�ķֲ�����һ�¡�
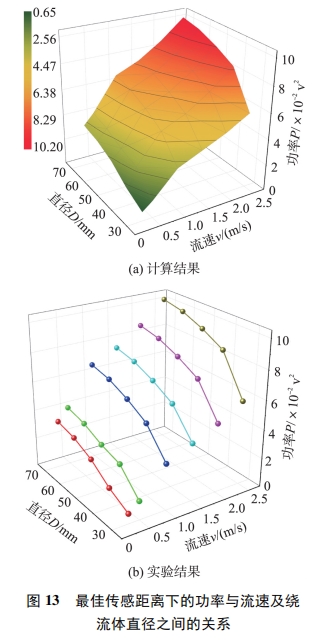
�D13��dz��т��о��x�µ�Pֵ(Posr)�cv��D֮�g��Ӌ(j��)�㼰��(sh��)�(y��n)�P(gu��n)ϵ���ɈD13(a)��֪��Posr�Sv������f����ͬ�r(sh��)�SD������f��;ͬ�r(sh��)���y(c��)�������cӋ(j��)����������һ�¡�����ԭ����(j��)ʽ(9)���ɣ�e�cv×D�������P(gu��n)ϵ����e���ӣ���(d��o)��������ϵ��(sh��)������ӳ����(ch��ng)����(d��ng)Խ���ң��˕r(sh��)�Y(ji��)��(g��u)�������܉������ӣ���(d��o)��PVDF���������ʎ��ֵ׃�a(ch��n)���ĉ�늹���Խ�ߡ����ЈD13(b)�@ʾ����(d��ng)v=2��5m/s��D=70mm��Posr�s��10×104mW;��(d��ng)v=0��5m/s��D=30mm��Posr�s��8×102mW�����Ɯy(c��)�������ٺ�ֱ��ͬ�r(sh��)�քeС��0��5m/s��30mm���a(ch��n)����Posr��С��8×102mW��Ȼ������Õr(sh��)��늉���U�壭U��ֵ��0��U��ֵ��Urms�ķ�����(l��i)�����������֪�u�ֵ�����������(hu��)�����ɔ_���y����ȡ���������@Ҳ�M(j��n)һ���C���˱��IJ�����ȡ�dz��ѹ��ʁ�(l��i)�����u���ڂ��о��x�ς��Џ�(qi��ng)�ȵĺ����ԡ�
4���Y(ji��)Փ
�O(sh��)Ӌ(j��)���о���һ�N���ڜu�����(d��ng)�ĉ�늂����b�á�ͨ�^(gu��)푑�(y��ng)��̖(h��o)�����˷dz��т��о��x�����c�@���wֱ�������ٵ�׃��Ҏ(gu��)�ɡ������������̣����ϔ�(sh��)ֵģ�ͣ���(g��u)�������ٜy(c��)�����·���������ͨ�^(gu��)��ȡ�l�������Мu���l���µĹ�������u�ֵĂ��Џ�(qi��ng)�ȡ���(sh��)�(y��n)�ͷ���Y(ji��)������:�����@���wֱ������ʹ�dz��т��о��x���ʾ�������;Ȼ�����ڷdz��т��о��x��׃����r�£��������ٿ�����߹��ʡ�ͨ�^(gu��)����(ch��ng)�����ó��˲ɼ���̖(h��o)��Losr�·dz���(y��u)�ı��|(zh��)ԭ��?y��n)?��ԓ̎���u������Ӌ(j��)������Ó�䷀(w��n)��������ϵ��(sh��)��(w��n)�������⣬�L(f��ng)����(sh��)�(y��n)�(y��n)�Cԓ���ڜu�����(d��ng)�����ԉ�늑ұ������ٸ�֪���ԡ��Y(ji��)������:ԓ������������Ч
�y(c��)������0��3m/s����;��(d��ng)v=2��5m/s��D=70mm��Posr�s��10×104mW;��(d��ng)v=0��5m/s��D=30mm��Posr�s��8×102mW��ԓ��ȡ�u����̖(h��o)�ķ�����Ҏ(gu��)�ɿ��Խ�Q���y(t��ng)�Ĝu����̖(h��o)���Լ��������y�y(c��)���Ć�(w��n)�}���U(ku��)����ԓ����ق������đ�(y��ng)�÷���������`������푑�(y��ng)�����ق����������O(sh��)Ӌ(j��)���y(c��)���ṩ���µ�̽�y(c��)������
ע�������������x�����¾���ԭ��(chu��ng)���D(zhu��n)�dՈ(q��ng)ע�����ĵ�ַhttp://www.tclife.cn/
��һƪ���£��u������Ӌ(j��)����DCSϵ�y(t��ng)���ܵ��D(zhu��n)�Q�|(zh��)����λ�đ�(y��ng)��
��һƪ���£����w������Ӌ(j��)��ú�V������˹��ż����L(f��ng)�еđ�(y��ng)��
���P(gu��n)�Įa(ch��n)Ʒ









�c�� "���P(gu��n)�ă�(n��i)��

- �̄�(w��)�������M(j��n)��(du��)�Ą�(l��)����Ͷ�Y�(xi��ng)Ŀ���M(j��n)���O(sh��)��2023-11-18
- �����Q��վ�b�Ãx���x�ͷ���2023-10-19
- ��ʳƷ�ӹ��^(gu��)���б����w���Ƿ���چ�(w��n)�}2022-03-30
- �_������(x��)�����ИI(y��)�İ�ȫ�ԺͿɳ��m(x��)��2022-03-30
- ��������Ӌ(j��)����Ȼ��Ӌ(j��)���еđ�(y��ng)��̽��2022-03-30
- ��Μy(c��)�����ЃɷNҺ�w֮�g�Ľ���2022-03-25